Плоские и пространственные предварительно напряженные конструкции, однопоясные и двухпоясные висячие системы, плоские и объемные пространственные сети могут быть рассчитаны при едином подходе методом конечных элементов. Начало развития этого метода было заложено в шестидесятые и семидесятые годы, получило в последствии широкое применение при расчете различных конструкций.
Использование этого метода позволяет производить как статические, так и динамические расчеты, применяя единый алгоритм подготовки и ввода исходных данных для конструкций различного вида и уровня сложности.
Существенный вклад в развитие метода конечных элементов внесли как отечественные ученые [13], [15], [31], так и зарубежные специалисты, позволившие разработать целый ряд универсальных программ для расчета на ЭВМ. К ним относятся ЛИРА, ГАММА, Mikrofe и другие отечественных авторов, а также NASTRAN, OKABUS, ANSYS, FLOWERS и другие зарубежных разработчиков.
Несмотря на очевидные преимущества, применение метода конечных элементов имеет и определенные недостатки. Использование метода упрощается в тех случаях, когда
- Элементы вантовой системы прямолинейны.
- Величина усилия предварительного напряжения известна заранее.
С другой стороны, при проведении расчетов могут возникнуть некоторые трудности, которые преодолеваются с помощью специальных приемов.
К таким проблемам относятся:
- - численная и практическая реализация предварительного напряжения;
- - учет влияния жесткости опорных контуров на напряженное состояние канатных элементов;
- - использование криволинейных элементов;
- - учет расчетов на устойчивость опорных конструкций.
В расчете таких конструкций методом конечных элементов принимаются следующие предпосылки:
- - канатные элементы аппроксимируются прямолинейными стержнями постоянного сечения;
188
- - канатные элементы передают только нормальную растягивающую силу;
- - опорные элементы работают на сжатие с изгибом;
- - внешняя нагрузка прикладывается в узлы конструкции;
- - зависимость между напряжениями и деформациями принимается линейной.
Эти предпосылки значительно упрощают расчет и позволяют рассматривать канатные конструкции как стержневые системы. При этом необходимо учитывать, что вантовые конструкции отличаются от стержневых тем, что первые из них могут быть многократно статически неопределимыми и при определенных условиях геометрически изменяемыми.
 Рис. 3.11. Геометрическая изменяемость отдельных систем:
Рис. 3.11. Геометрическая изменяемость отдельных систем:
а - система геометрически изменяема; б, в - системы геометрически неизменяемые.
На рис. 3.11, а показана простая канатная система, являющаяся геометрически изменяемой. Для схем рис. 3.11,6 и 3.11,в геометрическая неизменяемость обеспечена благодаря наличию достаточного количества стержней (рис. 3.11,6) или наличию внешней нагрузки.
Такие системы являются нелинейными, для их решения используются различные итеративные методы. Наиболее распространенными из них являются методы Эйлера, Ньютона-Рафсона и другие.
При расчете вантовых и предварительно напряженных комбинированных конструкций производится учет деформируемого состояния при составлении уравнений равновесия. Рассмотрим элемент, деформирующийся в плоскости под действием узловых сил. Из геометрических соотношений, принимая начальную длину l = 1, можно получить (рис. 3.12)
189
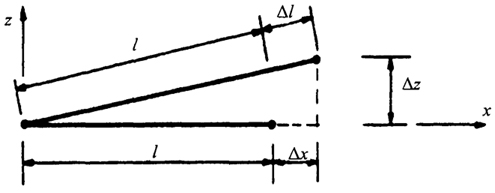 Рис. 3.12. Деформированное состояние стержня
Рис. 3.12. Деформированное состояние стержня
1 + Δl = √(1 + Δx)2 + Δz2 = √1 + 2 · Δx + Δx2 + Δz2
(3.44)
Раскладывая в степенной ряд подкоренное выражение (3.44),получим:
ε = u'x + · (u'x)2 + · (w'x)2
ε; = , u'x = , w'x =
(3.45 а)
Для деформирования стержня в пространстве выражение (3.45 а) имеет вид:
ε = u'x + · (u'x)2 + · (v'x)2 + · (w'x)2
(3.45 б)
В уравнениях (3.45 а) и (3.45 б) все слагаемые кроме первого являются нелинейными составляющими, зависят от деформированного состояния. Эти выражения применены в дальнейшем для определения энергии деформации стержневой системы, с помощью которой, используя первую теорему Кастелиано [103], находят матрицу жесткости для рассчитываемой конструкции.
Выражение для энергии деформации U имеет вид:
U = · σ · ε · dA · dx = · E · σ2 · dA · dx
или
U = · E · A · ε2 · dx
(3.46)
при A = const,
где А, Е - площадь сечения и модуль упругости стержня (E = const); σ - напряжение в стержне.
Подставляя значение деформаций (3.45 б) в (3.46), получим
U = · E · A · [(u`x + · (u'x)2 + · (v'x)2 + · (w'x)2]2 · dx
(3.47)
или
190
U = U(0) + U(1) + U(2)
(3.48)
где
U(0) = · (u'x)2 · dx
(3.49)
U(1) = · [(u'x)3 + (u'x) · (v'x)2 + (u') · (w')2 ] · dx
(3.50)
U(2) = · [( · (u')2 · (v')2 + (u')2 · (w')2 ) + · { (u')4 + (v')4 + (w')4} ] · dx
(3.51)
Составляющие сил, приложенных к стержню Si, по направлениям действующих деформаций di могут быть получены с учетом теоремы Кастелиано из выражения
Si =
(3.52)
Коэффициенты матрицы жесткости выглядят следующим образом
kij =
(3.53)
Матрица жесткости элементов для расчетов с учетом геометрической нелинейности имеет вид
К = К(0)+К(1)+К(2)
(3.54)
где К(0) - линейная составляющая матрицы жесткости;
K(1), К(2) - нелинейные добавки, учитывающие деформированное состояние стержневой системы при загружении, причем для К(1) входящие параметры перемещения в первой степени и для К(2) - во второй.
Соотношение между усилиями в узлах и перемещениями узлов для любого шарнирно-опертого элемента на ступени загружения q (рис. 3.13) в каждой системе координат (х, у, z) имеет в матричной форме следующий вид:
К · δ = S
(3.55)
где δ = {d1d2d3d4d5d6} - вектор перемещения узлов в локальной системе координат.
s = {S1S2S3S4S5S6} - вектор усилий в узлах.
К = К(0)+К(1)+К(2) - тангенциальная матрица жесткости стержня в локальной системе координат.
Составляющие тангенциальной матрицы жесткости шарнирно опертого элемента имеют следующий вид [50], [84]:
191
 Рис. 3.13. Шарнирно опертый стержневой элемент: 1,2,3... - направления перемещений
Рис. 3.13. Шарнирно опертый стержневой элемент: 1,2,3... - направления перемещений
K(0) = ·
(3.56)
где К11 = К44 = -K41 = l
K(1) = ·
| |
K11 |
K12 |
K13 |
K14 |
K15 |
K16 |
|
| |
K21 |
K22 |
0 |
K24 |
K25 |
0 |
|
| |
K31 |
0 |
K33 |
K34 |
0 |
K36 |
|
| |
K41 |
K42 |
K43 |
K44 |
K45 |
K46 |
|
| |
K51 |
K52 |
0 |
K54 |
K55 |
0 |
|
| |
K61 |
0 |
K63 |
K64 |
0 |
K66 |
|
(3.56)
| где |
K11 = K44 = -K41 = 3 · (d4 - d1)
K21 = K54 = -K51 = -K42 = d5 - d2
K31 = K64 = -K61 = -K43 = -K43 = d6 - d3 ,
K22 = K55 = -K52 = d4 - d1
K33 = K66 = -K63 = d4 - d1 |
192
K(2) = ·
| |
K11 |
K12 |
K13 |
K14 |
K15 |
K16 |
|
| |
K21 |
K22 |
K23 |
K24 |
K25 |
K26 |
|
| |
K31 |
K32 |
K33 |
K34 |
K35 |
K36 |
|
| |
K41 |
K42 |
K43 |
K44 |
K45 |
K46 |
|
| |
K51 |
K52 |
K53 |
K54 |
K55 |
K56 |
|
| |
K61 |
K62 |
K63 |
K64 |
K65 |
K66 |
|
(3.58)
| где |
K11 = K44 = -K41 = · (d4 - d1) + · (d5 - d2) + · (d6 - d3)
K21 = K54 = -K51 = -K42 = (d4 - d1) · (d5 - d2)
K31 = K64 = -K61 = -K43 = (d4 - d1) · (d6 - d3)
K22 = K55 = -K52 = · (d4 - d1) + · (d5 - d2) + · (d6 - d3)
K23 = K56 = -K26 = -K53 = (d5 - d2)· (d6 - d3)
K33 = K66 = -K63 = · (d4 - d1) + · (d5 - d2) + · (d6 - d3) |
Зависимость между узловой нагрузкой и перемещениями узлов в глобальной системе координат (X,Y,Z) имеет вид
K · δ = S
(3.58)
| где |
δ = {d1d2d3d4d5d6}
S = {S1S2S3S4S5S6}
K = K(0) + K(1) + K(2) |
Переход от параметров матрицы жесткости, перемещений и усилий в локальной системе координат к соответствующим значениям в глобальной системе координат (рис. 3.14) осуществляется следующим образом
К = Т · К · ТT
(3.60)
d = T · d
(3.61)
d = TT · d
(3.62)
S = TT · S
(3.63)
S = T · S
(3.64)
Здесь Т - матрица направляющих косинусов;
ТT - транспонированная матрица Т;
d, S - соответственно перемещения узлов и усилия в элементах в глобальной системе координат;
d,S - перемещения узлов и усилия в элементах в локальной системе координат.
Матрица направляющих косинусов может быть записана в виде:
193
T =
| |
Cx |
Cy |
Cz |
0 |
0 |
0 |
|
| |
-Cx · Cly |
l1/l |
-Cz · Cly |
0 |
0 |
0 |
|
| |
-Clz |
0 |
Clx |
0 |
0 |
0 |
|
| |
0 |
0 |
0 |
Cx |
Cy |
Cz |
|
| |
0 |
0 |
0 |
-Cx · Cly |
l1/l |
-Cz · Cly |
|
| |
0 |
0 |
0 |
-Clz |
0 |
Clx |
|
(3.65)
где Cy =
,
lx = X2 - X1, Clx =
,
Cy =
,
ly = Y2 - Y1, Cly =
,
Cz =
, l
z =
Z2 - Z1, Clz =
.
l = √lx2 + ly2 + lz2 , l1 = √lx2 + lz2.
 Рис. 3.14. Переход от локальной к глобальной системам координат
Рис. 3.14. Переход от локальной к глобальной системам координат
Для изгибаемого элемента относительная деформация под нагрузкой может быть представлена в виде
ε = u' + · (u')2 + · (w')2 + z · w'' + y · v''
(3.66)
где z, у - соответственно координаты точки в сечении стержня относительно осей у и z.
Подставляя значение (3.66) в выражение для энергии деформации можно получить матрицу жесткости (3.4) для изгибаемого элемента по направлениям перемещений согласно рис. 3.15.
194
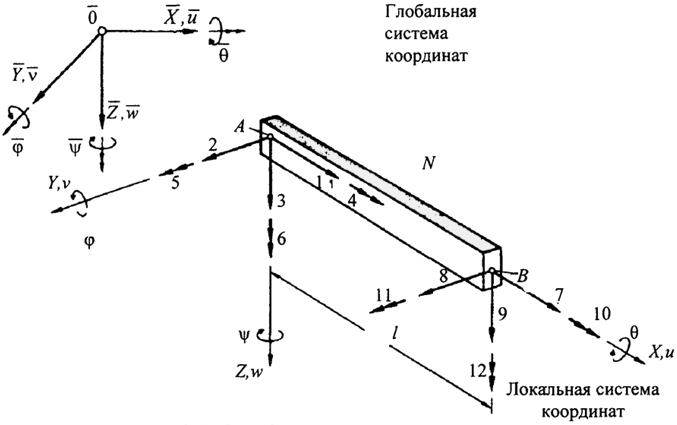 Рис. 3.15. Изгибаемый элемент в пространстве
Рис. 3.15. Изгибаемый элемент в пространстве
K0 =
| |
K11 |
0 |
0 |
0 |
0 |
0 |
K17 |
0 |
0 |
0 |
0 |
0 |
|
| |
0 |
K22 |
0 |
0 |
0 |
K26 |
0 |
K28 |
0 |
0 |
0 |
K2,12 |
|
| |
0 |
0 |
K33 |
0 |
K35 |
0 |
0 |
0 |
K39 |
0 |
K3,11 |
0 |
|
| |
0 |
0 |
0 |
K44 |
0 |
0 |
0 |
0 |
0 |
K4,10 |
0 |
0 |
|
| |
0 |
0 |
K53 |
0 |
K55 |
0 |
0 |
0 |
K59 |
0 |
K5,11 |
0 |
|
| |
0 |
K62 |
0 |
0 |
0 |
K66 |
0 |
K68 |
0 |
0 |
0 |
K6,12 |
|
| |
K71 |
0 |
0 |
0 |
0 |
0 |
K77 |
0 |
0 |
0 |
0 |
0 |
|
| |
0 |
K82 |
0 |
0 |
0 |
K86 |
0 |
K88 |
0 |
0 |
0 |
K8,12 |
|
| |
0 |
0 |
K93 |
0 |
K95 |
0 |
0 |
0 |
K99 |
0 |
K9,11 |
0 |
|
| |
0 |
0 |
0 |
K10,4 |
0 |
0 |
0 |
0 |
0 |
K10,10 |
0 |
0 |
|
| |
0 |
0 |
K11,3 |
0 |
K11,5 |
0 |
0 |
0 |
K11,9 |
0 |
K11,11 |
0 |
|
| |
0 |
K12,2 |
0 |
0 |
0 |
K12,6 |
0 |
K12,8 |
0 |
0 |
0 |
K12,12 |
|
(3.67)
где K11 = K77 = -K71 =
;
K22 =
K88 = -
K82 = 12 ·
;
K26 = K3,11 = -K8,12 = 6 ·
;
K33 =
K99 = -
K93 = 12 ·
;
K35 = K3,11 = -K9,11 = -6 ·
;
K44 =
K10,10 =
K10,4 =
;
K55 = K11,11 = 4 ·
;
K5,11 = 2 ·
;
K66 = K12,12 = 4 ·
;
K6,12 = 2 ·
.
195
Первая нелинейная компонента
K1 =
| |
K11 |
K12 |
K13 |
0 |
K15 |
K16 |
K17 |
K18 |
K19 |
0 |
K1,11 |
K1,12 |
|
| |
K21 |
K22 |
0 |
0 |
0 |
K26 |
K27 |
K28 |
0 |
0 |
0 |
K2,12 |
|
| |
K31 |
0 |
K33 |
0 |
K35 |
0 |
K37 |
0 |
K39 |
0 |
K3,11 |
0 |
|
| |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
| |
K51 |
0 |
K53 |
0 |
K55 |
0 |
K57 |
0 |
K59 |
0 |
K5,11 |
0 |
|
| |
K62 |
K62 |
0 |
0 |
0 |
K66 |
K67 |
K68 |
0 |
0 |
0 |
K6,12 |
|
| |
K71 |
K72 |
K73 |
0 |
K75 |
K76 |
K77 |
K78 |
0 |
0 |
0 |
K7,12 |
|
| |
K81 |
K82 |
0 |
0 |
0 |
K86 |
K87 |
K88 |
0 |
0 |
0 |
K8,12 |
|
| |
K91 |
0 |
K93 |
0 |
K95 |
0 |
K97 |
0 |
K99 |
0 |
K9,11 |
0 |
|
| |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
| |
K11,1 |
0 |
K11,3 |
0 |
K11,5 |
0 |
K11,7 |
0 |
K11,9 |
0 |
K11,11 |
0 |
|
| |
K12,1 |
K12,2 |
0 |
0 |
0 |
K12,6 |
K11,7 |
K12,8 |
0 |
0 |
0 |
K12,12 |
|
(3.68)
где K11 = K77 = -K71 = 3 · (d7 - d1);
K21 = -K81 = -K72 = K87 =
·
(d8 - d2) -
·
(d6 + d12);
K31 = -K91 = -K73 = K97 =
·
(d9 - d3) -
·
(d5 + d11);
K51 = -K75 = -
·
(d9 - d3) -
·
(4 · d5 - d11);
K61 = -K76 =
·
(d8 - d2) -
·
(4 · d6 - d12);
K11,1 = -K11,7 = -
·
(d9 - d3) -
·
(4 · d11 - d5);
K12,1 = -K12,7 =
·
(d8 - d2) -
·
(4 · d12 - d6);
K22 = K33 = K88 = K99 = -K82 = -K93 =
·
(d7 - d1);
K62 = K12,2 = -K53 = -K11,3 =
·
(d7 - d1);
K95 = -K86 = -K12,8 = K11,9 =
·
(d7 - d1);
K55 = K66 = K11,11 = K12,12 =
·
(d7 - d1);
K11,5 = K12,5 =
·
(d7 - d1).
Вторая нелинейная компонента
196
K2 =
| |
K11 |
K12 |
K13 |
0 |
K15 |
K16 |
K17 |
K18 |
K19 |
0 |
K1,11 |
K1,12 |
|
| |
K21 |
K22 |
K23 |
0 |
K25 |
K26 |
K27 |
K28 |
K29 |
0 |
K2,11 |
K2,12 |
|
| |
K31 |
K32 |
K33 |
0 |
K35 |
K36 |
K37 |
K38 |
K39 |
0 |
K3,11 |
K3,12 |
|
| |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
| |
K51 |
K52 |
K53 |
0 |
K55 |
K56 |
K57 |
K58 |
K59 |
0 |
K5,11 |
K5,12 |
|
| |
K61 |
K62 |
K63 |
0 |
K65 |
K66 |
K67 |
K68 |
K69 |
0 |
K6,11 |
K6,12 |
|
| |
K71 |
K72 |
K73 |
0 |
K75 |
K76 |
K77 |
K78 |
K79 |
0 |
K7,11 |
K7,12 |
|
| |
K81 |
K82 |
K83 |
0 |
K85 |
K86 |
K87 |
K88 |
K89 |
0 |
K8,11 |
K8,12 |
|
| |
K91 |
K92 |
K93 |
0 |
K95 |
K96 |
K97 |
K98 |
K99 |
0 |
K9,11 |
K9,12 |
|
| |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
| |
K11,1 |
K11,2 |
K11,3 |
0 |
K11,5 |
K11,6 |
K11,7 |
K11,8 |
K11,9 |
0 |
K11,11 |
K11,12 |
|
| |
K12,1 |
K12,2 |
K12,3 |
0 |
K12,5 |
K12,6 |
K11,7 |
K12,8 |
K12,9 |
0 |
K12,11 |
K12,12 |
|
(3.69)
где
K11 = f1 · [3 · (d7 - d1)2 +
·
(d2 - d8) · (d6 + d12) +
·
(d6 - d12)2] +
f1 ·
[ ·
(d3 - d9)2 -
·
(d3 - d9) · (d5 + d11) +
·
(d5 - d11)2];
K77 = -K71 = K11;
K21 = f1 · [-2 · (d7 - d1) · (
·
(d2 - d8) +
·
(d6 + d12))];
K81 = K72 = -K21;
K31 = f1 · [-2 · (d7 - d1) · (
·
(d3 - d9) -
·
(d5 + d11))];
K91 = K73 = -K31;
K51 = f1 · [2 · (d7 - d1) · (
·
(d3 - d9) -
·
(4 · d5 - d11))];
K75 = -K51;
K61 = f1 · [2 · (d7 - d1) · (-
·
(d2 - d8) -
·
(4 · d6 - d12))];
K76 = -K61;
K11,1 = f1 · [2 · (d7 - d1) · (
·
(d3 - d9) -
·
(4 · d11 - d5))];
K11,7 = -K11,1;
K12,1 = f1 · [2 · (d7 - d1) · (-
·
(d2 - d8) -
·
(4 · d12 - d6))];
K12,7 = -K12,1;
197
K22 = f2 · [864 · (d2 - d8)2 + 216 · l · (d2 - d8) · (d6 + d12) + 36 · l2 · (d62 + d122) + 168 · (d7 - d1)2] + f2 · [288 · (d3 - d9) · (d5 + d11) + 12 · l2 · (d52 + d112)];
K88 = K22;
K32 = f2 · [576(d2 - d8) · (d3 - d9) - 72 · l · ((d2 - d8) · (d5 + d11) - (d3 - d9) · (d6 + d12)] - f2 · [24 · l2 · (d5 · d6 + d11 · d12)];
K92 = K83 = -K32;
K52 = f2 · [-72 · l · (d2 - d8) · (d3 - d9) + 24 · l2 · (d5 · (d2 - d8) - d6 · (d3 - d9)] - f2 ·[2 · l3 · (d5 · (d6 - d12) - d11 · (d6 + d12))];
K63 = K85 = -K52;
K62 = f2 · [108 · l · (d2 - d8)2 + 72 · l2 · d6 · (d2 - d8) - 3 · l2 · (d62 - 2 · d6 ·d12 - d122) + 28 · l · (d7 - d1)2] + f2 · [36 · l · (d3 - d9)2 - 24 · l2 ·d5 · (d3 - d9) - l3 · (d52 - 2 · d5 · d11 - d112)];
K86 = -K62;
K11,2 = f2 · [-72 · l · (d2 - d8) · (d3 - d9) + 24 · l2 · (d11 · (d2 - d8) - d12 · (d3 - d9)] - f2 · [2 · l3 · (d11 · (d6 - d12) - d5 · (d6 + d12))];
K12,3 = K11,8 = -K11,2;
K33 = f2 · [864 · (d3 - d9)2 - 216 · l · (d3d9) · (d5 + d11) + 36 · l2 · (d52 + d112) + 168 · (d7 - d1)2] + f2 · [288 · (d2 - d8)2 + 72 · l · (d2 - d8) · (d6 + d12) + 12 · l2 · (d62 + d122)];
K99 = -K93 = K33;
K53 = f2 · [-108 · l · (d3 - d9)2 + 72 · l2 · d5 · (d3 - d9) + 3 · l3 · (d52 - 2 · d5 · d11 - d112)] - f2 · [28 · l · (d7 - d1)2 - 36 · l · (d2 - d8)2 - 24 · l2 · d6 · (d2 - d8) + l3 · (d62 - 2 · d6 · d12 - d122)];
K95 = -K53;
K11,3 = f2 · [-108 · l · (d3 - d9)2 + 72 · l2 · d11 · (d3 - d9) + 3 · l3 · (d52 + 2 · d5 · d11 - d112)] - f2 · [28 · l · (d7 - d1)2 - 36 · l · (d2 - d8)2 - 24 · l2 · d12 · (d2 - d8) - l3 · (d62 + 2 · d6 · d12 - d122)];
K11,9 = -K11,3;
K55 = f2 · [36 · l2 · (d3 - d9)2 + 6 · l3 · (d3 - d5) · (d5 - d11) + 12 · l4 · (2 · d52 -
·
d5 · d11 +
·
d112)] +
f2 ·
[ ·
(d7 - d1)2 + 12 · l2 · (d2 - d8)2 - 2 · l3 · (d2 - d8) · (d6 - d12) + 4 · l4 · (2 · d62 -
·
d6 · d12 +
·
d122)];
198
K65 = f · [-24 · l2 · (d2 - d8) · (d3 - d9) - 2 · l3 · ((d5 - d11) · (d2 - d8) - (d6 - d12) · (d3 - d9)] + f · [16 · l4 · (d5 · d6 -
·
d6 · d11 -
·
d5 · d12 +
·
d11 · d12)];
K11,5 = f2 · [-6 · l3 · (d3 - d9) · (d5 + d11) - 3 · l4 · (d52 -
· d
5 · d
11 + d
112) -
·
(d7 - d1_2] +
f2 ·
[2 · l3 · (d2 - d8) · (d6 + d12) - l4 · (d62 -
·
d6 · d12 + d122)];
K12,5 = f · [2 · l3 · ((d2 - d8) · (d5 + d11) - (d3 - d9) · (d6 + d12))] - f · [4 · l4 · (
·
d5 · d6 -
·
d5 · d12 +
·
d11 · d12)];
K11,6 = K12,5;
K66 = f2 · [36 · l2 · (d2 - d8) - 6 · l3 · (d2 - d8) · (d6 - d12) + 12 · l · (2 · d62 -
·
d6 · d12 +
·
d122)] +
f2 ·
[ ·
(d7 - d1)2 + 12 · l2 · (d3 - d9) + 2 · l3 · (d3 - d9) · (d5 - d11)] +
f2 ·
[4 · l4 · (2 · d52 -
·
d5 · d11 +
·
d112)];
K12,6 = f2 · [6 · l3 · (d2 - d8) · (d6 + d12) - 3 · l4 · (d62 -
·
d6 · d12 + d122) -
·
(d7 - d1)2] -
f2 ·
[2 · l3 · (d3 - d9) · (d5 + d11) - l4 · (d52 -
·
d5 · d11 + d112)];
K11,11 = f · [36 · l2 · (d3 - d9)2 - 6 · l3 · (d3 - d9) · (d5 - d11) + 12 · l4 · (
·
d52 -
·
d5 · d11 + 2 · d112)] +
f ·
[ ·
(d7 - d1)2 + 12 · l2 · (d2 - d802 + 2 · l3 · (d2 - d8) · (d6 - d12)] +
f ·
[4 · l4 · ( ·
d62 -
·
d6 · d12 + 2 · d122)];
K12,11 = f2 · [-24 · l2 · (d2 - d8) · (d3 - d9) + 2 · l3 · ((d2 - d8) · (d5 - d11) - (d3 - d9) · (d6 - d12))] + f2 · [16 · l4 · (
·
d5 · d6 -
·
d6 · d11 -
·
d5 · d12 + d11 · d12)];
K12,12 = f2 · [36 · l2 ·(d2 - d8)2 + 6 · l3 · (d2 - d8) · (d6 - d12) + 12 · l4 · (
·
d62 -
·
d6 · d12 + 2 · d122)] +
f2 ·
[ ·
(d7 - d1)2 + 12 · l2 · (d3 - d9)2 - 2 · l3 · (d3 - d9) · (d5 - d11)] +
f2 ·
[4 · l4 · ( ·
d52 -
·
d5 · d11 + 2 · d112)];
f1 =
;
f2 =
199
Для изгибаемых элементов матрица направляющих косинусов имеет вид
T12x12=
(3.70)
где
T1 =
(3.71)
здесь l2 = √t12 + t22 + t32; l3 = √txy2 + tyz2 + txz2;
txy =
·
(Xi · (Yg - Xk) - Yi · (Xg - Xk) + Xg · Yk - Yg · Xk);
tyz =
·
(Yi · (Zg - Zk) - Zi · (Yg - Yk) + Yg · Zk - Zg · Yk);
txz =
·
(Zi · (Xg - Xk) - Xi · (Zg - Zk) + Zg · Xk - Xg · Zk) .
=
×
200
