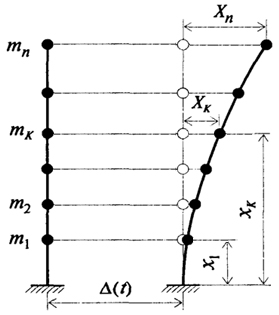
Рис. 2.8. Расчетная схема системы со многими степенями свободы
Для определенности в качестве расчетной схемы системы со многими степенями свободы будем рассматривать консольный стержень с п сосредоточенными массами (рис. 2.8).
Обозначения на этом рисунке приняты в соответствии с обозначениями СНиП II-7-81:
QK=mKg- вес массы тк; Хк - относительное перемещение массы тк; хк - расстояние от заделки до этой массы. Используя для расчета этой системы метод перемещений, введем в узлы сосредоточенных масс упругие связи, препятствующие линейным смещениям.
Пусть rki,- реакция в K-ой упругой связи, вызванная действием единичного перемещения i-ой связи. Тогда составляя уравнение равновесия всех сил, приложенных к K-ой массе в любой момент времени движения системы, получаем
| mK[X..K(t) + Δ..(t)] = - |
i=1∑n |
rkiXi(t) - Фk(t), (K=1,2,3...,n) |
(2.37)
где Фk(t) – силы сопротивления.
Введем вектор перемещений X→T={X1,X2,…,Xn}, вектор сил сопротивления Ф→T={Ф1,Ф2,…,Фn}, а также матрицу жесткости
K =
| r11 |
r12 |
... |
r1n |
| r21 |
r22 |
... |
r2n |
| ... |
... |
... |
... |
| rn1 |
rn2 |
... |
rnn |
36
и диагональную матрицу масс
M =
Тогда систему уравнений (2.37) можно записать в матричной форме
M →X.. + K →X + →Ф = - →Δ..
(2.38)
В данном случае уравнения движения системы с п степенями свободы записаны в форме метода перемещений. Для того, чтобы перейти к форме метода сил, вводим матрицу податливости
L =
| δ11 |
δ11 |
… |
δ1n |
| δ21 |
δ22 |
… |
δ2n |
| ... |
... |
... |
... |
| δn1 |
δn2 |
… |
δnn |
причем, как известно, LK = KL = E (единичная матрица).
Умножая уравнение (2.38) слева на матрицу L, получаем
LM →X.. + →X + L →Ф = - LM →Δ..
(2.39)
37
