1. Поправка за вращение Земли
Координаты спутников вычисляют на определенный момент времени относительно геоцентрической системы координат. За время распространения сигнала τ от спутника до приемника вследствие вращений Земли приемник переместится на некоторую величину. Так как время распространения сигнала от спутника до приемника составляет ≈ 0,07 - 0,08 с, Земля за это время повернется на угол "1,5’’, и приемник переместится на 40 - 50 м (рис. 14.14). В связи с этим возникает необходимость приведения координат спутника или приемника к единому моменту времени. Если координаты приемника в момент излучения сигнала со спутника были X, Y, Z, а в момент приема сигнала стали X’, Y’, Z’, то можно записать следующие соотношения:

где α = ωeτ - угол поворота Земли вокруг оси вращения за время распространения сигнала τ.
2. Поправка за релятивистские эффекты

Рис. 14.14. Смещение приемника за время распространения сигнала
Необходимость введения поправок за релятивистские эффекты связана с тем, что основные часы, определяющие шкалу времени системы GPS и часы на спутнике расположены в разных местах с различными гравитационными потенциалами и перемещаются с различными скоростями. Релятивистские эффекты являются причиной смещения частот генераторов на спутниках (основная частота генератора спутника смещается на величину 0,0045 Гц). Величина смещения содержит небольшую постоянную компоненту, зависящую от орбитальной высоты спутника и периодическую компоненту. Постоянная часть смещения часов учтена в поправочном коэффициенте часов спутника а1. Периодическую часть поправки вычисляют по формуле:
182
∆tr = -4,43·10-10e√A sinE.
Дрейф спутниковых часов характеризуется формулой:
∆tr = -4,43·10-10e√A cosE
Максимальная величина поправки в спутниковые часы составляет 70 наносекунд, а дрейф часов - 0,01 наносекунды.
3. Влияние ионосферы и тропосферы
В различных областях науки и техники атмосферу разделяют по высоте над поверхностью Земли на различные участки с самостоятельными названиями. В табл. 14.2 приведены основные принципы деления атмосферы на составные части и их названия.
Таблица 14.2

Электромагнитные колебания распространяются в среде, обладающей дисперсией (зависимости скорости распространения от частоты колебаний), обладают двумя различными скоростями распространения:
- - фазовой скоростью - скоростью распространения фазы несущей частоты;
- - групповой скоростью сигнала, состоящего из группы волн (в нашем случае модулирующего сигнала - кода).
Соотношение между групповой - υg и фазовой υp скоростями распространения электромагнитного колебания описывается уравнением Рэлея:
υg = υp -
.
Соответствующие этим скоростям групповой и фазовой показатели
183
преломления связаны между собой следующими соотношениями:
ng = np + f .(14.1)
Ионосфера обладает дисперсией для электромагнитных волн, поэтому при фазовых измерениях для вычисления поправок за влияние ионосферы используют фазовый показатель преломления пp, а при кодовых измерениях - групповой - ng. Тропосфера не обладает ярко выраженной дисперсией для волн разночастотного диапазона, следовательно,
f
= 0 и
ng =
nф.
Показатель преломления принято описывать формулой:
N = 1 + N,
где N - индекс преломления в единицах шестого знака.
Индекс преломления для тропосферы Nт в разночастотном диапазоне описывают двумя компонентами: сухая и влажная:
Nт = Nd + Nw = C1
+
C2
где С1 = 77,6; С2 = 3,73·105; ND = 77,6
- сухая компонента индекса преломления;
NW = 3,73·10
5
- влажная компонента индекса преломления;
Т - температура Кельвина.
Зависимость индекса преломления тропосферы от высоты при вычислении поправок в спутниковые измерения принято описывать с использованием эффективных высот На и Hw (модель Хопфильда):
Ha = 40,136 + 148,72(T - 273,16) (м)
Hw = 11000 м.
Уменьшение индекса преломления с высотой h над поверхностью Земли представляют в виде:
Nd(h) = Nd0(
);
184
Nw(h) = Nw0(
)4
где Hd0 и Hw0 - сухие и влажные компоненты индекса преломления в точке стояния приемника.
Поправки во время распространения сигнала в тропосфере вычисляются методом интегрирования:

где С - скорость света (м/с); С - 299792458 м/с.
Интегрирование вдоль пути распространения электромагнитных волн - задача довольно сложная, поэтому часто пользуются приближенными формулами для расчета поправок:

где Е - угол возвышения спутника над горизонтом (в градусах) в точке стояния приемника:
Kd = 155,2·10-7
Hd;
Kw = 155,2·10-7
Hw,
где Т, Р и е - соответственно температура воздуха (в градусах Кельвина), давление воздуха и давление водяных паров (в Гектопаскалях).
Ионосфера вносит существенно большие искажения в результаты измерений, структура ионосферы более сложная и трудно учитывается. Она характеризуется электронной плотностью (количеством электронов в одном кубическом метре), которая может меняться в больших пределах даже в течение суток, так как зависит от солнечного излучения, солнечной активности (количества пятен на Солнце), космического излучения и некоторых других факторов. За состоянием ионосферы ведут постоянные наблюдения, и ее обобщенные характеристики передают в навигационном сообщении спутника.
Ионосферу делят на четыре основных слоя, которые называют D, Е, F1 и F2. В табл. 14.3 приведены приближенные характеристики слоев ионосферы.
185
Таблица 14.3
| Слой |
D |
Е |
F1 |
F2 |
| Высота слоя (км) |
60 - 90 |
85 - 140 |
140 - 200 |
200 - 1000 |
| Электронная плотность пе (эл/м3) |
|
|
|
|
| днем |
102 - 104 |
105 |
5·105 |
106 |
| ночью |
- |
2·103 |
1·103 |
3·105 |
Важной характеристикой ионосферы (для описания распространения электромагнитных волн) является электронное содержание (electron content) I:
I =
ne(s)·
dS.
Интеграл содержит общее количество электронов в столбе площадью 1 м2 и высотой столба, равной расстоянию от спутника до приемника. Единицей измерения является TECU (Total Electrjn Content Unit):
1 TECU = 1·1016 эл/м2.
Ионосфера обладает дисперсией для радиоволн, и фазовый показатель преломления ионосферы характеризуется формулой:
n2 = 1 - ne
где е - заряд электрона; те - масса электрона.
Для практических расчетов обычно используют формулу:
np = 1 -
.
Для более строгого описания фазового показателя преломления ионосферы используют ряд:
np = 1 +
+
+
+ …,
где С2 = -40,3.
Для вычисления группового показателя преломления необходимо найти величину дисперсии:
= -
-
-
186
и в соответствии с формулой (14.1) имеем:
ng = np -
-
-
.
или
ng = 1 -
-
-
.
В практических расчетах часто пользуются приближенной формулой:
nп = 1 +
.
При фазовых измерениях двухчастотным приемником появляется возможность в значительной степени ослабить влияние ионосферы, образуя новую комбинацию из результатов фазовых измерений на несущих частотах f1 и f2:

Максимальные ошибки, которые может вносить ионосфера в расстояние между спутником и приемником, расположенным в зените, приведены в табл. 14.4.
Таблица 14.4
| Частота |
Ошибки (м) |
|
|
| |
Первого порядка f -2 |
Второго порядка f -3 |
Третьего порядка f -4 |
| L1 |
32,5 |
0,036 |
0,002 |
| L2 |
53,5 |
0,076 |
0,007 |
| L2 |
0,0 |
0,026 |
0,006 |
4. Влияние зашумления сигнала
В связи с тем, что в стандарт частоты спутника (10,23 МГц) вносятся искажения, несущая частота спутника также содержит эти искажения. Эта ошибка может составлять значительную величину. На рис. 14.15 представлены результаты исследований влияния искажения стандарта частоты спутника на результаты вычисления расстояния между спутником и приемником. На рис. 14.16 представлены результаты совместного влияния зашумления стандарта частоты и эфемерид спутника.
187
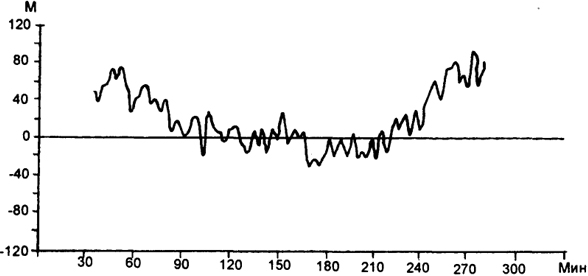
Рис. 14.15. Влияние искажения стандарта частоты
Влияние этих ошибок может быть существенно ослаблено путем синхронизированных измерений приращений координат несколькими приемниками. В связи с тем, что российская система ГЛОНАСС не использует систему зашумления сигнала, она может иметь преимущества при геодезических измерениях.
5. Влияние отраженных сигналов
При приеме сигнала со спутника приемник может принять и сигналы, отраженные от поверхности Земли или окружающих предметов (рис. 14.17). В результате фазовые измерения производятся по суммарному сигналу, имеющему значительные искажения. Представим основной сигнал со спутника в виде:
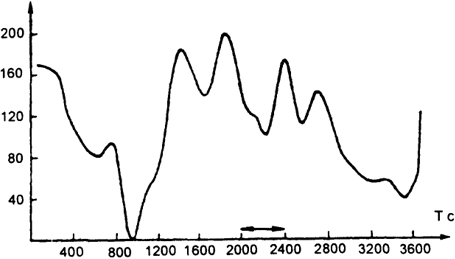
Рис. 14.16. Влияние искажения сигналов
188
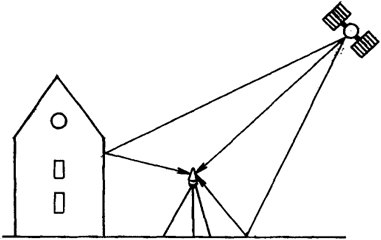
Рис. 14.17. Влияние отраженных сигналов
AD = A·cosφD
и отраженный от местного предмета
AR = kA·cos(φD + φ),
где А - амплитуда сигнала, поступающего со спутника; kA - амплитуда отраженного сигнала; k - коэффициент отражения (О < k < 1); φD - фаза неискаженного сигнала; φD + φ - фаза отраженного сигнала.
Суммарный сигнал будет иметь вид:
A = AD + AR = αAcos(φD + ∆φ),
tg∆φ =
;
α = √
1 + k2 + 2cosφ.
При сильном отраженном сигнале (k - 1) максимальная величина искажений результатов фазовых измерении может достигать 90°, а в линейной мере результаты фазовых измерении могут быть искажены на 5 см. Наличие отраженных сигналов можно выявить при обработке результатов измерений и исключить искаженные результаты измерений из расчетов.
189
