Отметим, что основное назначение GPS - военное. С целью исключения несанкционированного использования системы в эфемериды спутников умышленно вносятся искажения, а также искажаются показания часов спутников и несущая частота (так называемый режим Selective Availabilig (SA)). Исключить эти искажения может лишь приемник, имеющий доступ к Р-коду (только военный приемник). В этом случае предельная ошибка определения абсолютных координат составляет 10 - 20 м. Обычный приемник, работающий лишь по С/А коду, может определить абсолютные координаты с предельной ошибкой 150 - 200 м. В системе ГЛОНАСС искажения не вносятся и любой пользователь может определить координаты своего местоположения с предельной ошибкой 20 м.
176
Приведем некоторые возможные классификации современных приемников.
Приемники, способные принимать:
- 1) С/А код;
- 2) С/А код + фазовые измерения на частоте L1;
- 3) С/А код + фазовые измерения на частотах L1 и L2;
- 4) С/А код + Р код + фазовые измерения на частотах L1 и L2.
В геодезии широкое применение нашли приемники, занимающие 2 и 3-ю позиции в вышеприведенной классификации. Кроме этого, приемники можно классифицировать по области применения: 1) геодезические приемники; 2) навигационные приемники; 3) приемники времени; 4) военные приемники.
В геодезических работах в основном используются приемники, способные производить фазовые измерения на частоте L1 или двух частотах L1 и L2. Однако для определения поправок в часы приемника и обеспечения синхронной работы нескольких одновременно работающих приемников параллельно с фазовыми измерениями производятся кодовые измерения с использованием С/А кода. По кодовым измерениям микропроцессор приемника автоматически вычисляет поправку и корректирует часы приемника с точностью 1 ms = 0,001 с. Следовательно, несинхронность работы приемников, производящих измерения на различных пунктах, не превышает 2 ms.
Основные блоки GPS приемника представлены на рис. 14.12.
1 - антенна с предусилителем; 2 - идентификатор сигналов и распределение частот по каналам; 3 - микропроцессор для управления работой приемника; 4 - расшифровка принятой информации, вычисления абсолютных координат и поправок в часы приемника,

Рис. 14.12. Структурная схема приемника
177
выполнения фазовых измерений; 5 - стабильный кварцевый генератор; 6 - дисплей и панель управления; 7 - блок памяти для записи и хранения информации; 8 - блок питания.
Для того, чтобы производить фазовые измерения на несущей частоте, необходимо произвести демодуляцию сигнала (очистить сигнал от модуляции). Одним из способов демодуляции сигнала является квадратирование, т. е. умножение сигнала самого на себя.
Если модулированный сигнал представить в виде:
x = P(t)sinωt,
где P(t) - амплитуда сигнала, которая в определенные моменты времени принимает значения +1 или -1, то после возведения в квадрат этого сигнала амплитуда сигнала изменяться не будет, но частота удвоится (см. рис. 14.11).
x2 = P2(t)sin2ωt =
(1 – cos2ω
t)
В другом способе демодуляции сигнал разделяют на два, в одном из сигналов изменяют фазу на π/2 и вновь сигналы складывают. В результате получают гармонический синусоидальный сигнал.
В настоящее время наибольшее распространение получили приемники одночастотные (L1) двенадцатиканальные и двухчастотные (L1 и L2) по двенадцать каналов на каждую частоту. Такими приемниками можно одновременно принимать сигналы от двенадцати спутников.
Частота сигнала, принятая приемником, слишком высокая, чтобы на ней можно было производить высокоточные измерения, поэтому ее понижают путем вычитания из принятой частоты генератора приемника (эта операция называется гетеродинированием). Гетеродинирование производят в несколько этапов, но суммарная частота, которую вычитают из принятого сигнала, близка к частоте, излучаемой спутником. На выделенной разностной частоте производят фазовые измерения.
Приемник принимает сигналы от нескольких спутников (как правило, не менее четырех) и фазовые измерения производятся по всем каналам единовременно. На рис. 14.13 иллюстрируется принцип фазовых измерений в двух каналах (в остальных каналах - аналогично). На первой и второй временных осях (1 и 2) показаны принятые сигналы от двух различных спутников (после снятия с них модуляции). На третьей временной оси показана частота гетеродина (суммарная частота гетеродинирования) общая для всех спутниковых сигналов. На четвертой и пятой временных осях представлен результат гетеродинирования (разностная частота):
∆f = fg - fs.
178
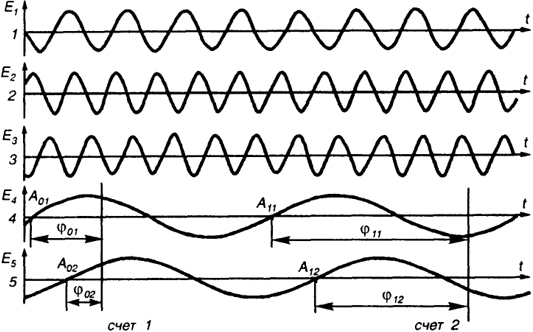
Рис. 14.13. Принцип фазовых измерений в двух каналах
В том случае, если частота принятого сигнала меньше частоты гетеродина - результат фазовых измерений имеет знак "плюс"; если принятая частота больше частоты гетеродина - знак "минус".
Начало фазовых измерений определяется точкой перехода разностного сигнала через ноль (команда "старт"). Если в течение целого периода не поступила команда "счет", результат измерения обнуляется и счет начинается вновь. Таким образом, при поступлении первой команды "счет" записывается результат измерения от стартовых точек А01 и А02 (см. рис. 14.13) до команды "счет 1": φ01 и φ02. При этом первый результат измерения по абсолютному значению всегда меньше единицы и составляет долю фазового цикла. При поступлении следующих команд "счет" измеряется и заносится в память количество фазовых циклов и доли цикла от начальных точек A01, A02 до поступления очередной команды "счет". Команды "счет" поступают во все каналы одновременно. Влияние ошибок, свойственных спутниковым методам измерения, существенно уменьшается, если одновременно используется несколько приемников, установленных на определяемых пунктах, синхронно принимающих сигналы от одних и тех же спутников. В таком случае в разностях координат любой пары приемников все приведенные источники ошибок будут существенно уменьшены. Разности координат по С/А кодовым измерениям, производившимся синхронно несколькими приемниками по одним и тем же спутникам, имеют среднюю квадратическую ошибку 0,3 - 3м. Разность координат, вычисленных по результатам фазовых измерений, характеризуется средней квадратической ошибкой 0,5 см + D10-6,
179
где D - расстояние между приемниками. Основные источники ошибок, сопровождающие спутниковые измерения, приведены в табл. 14.1.
Таблица 14.1
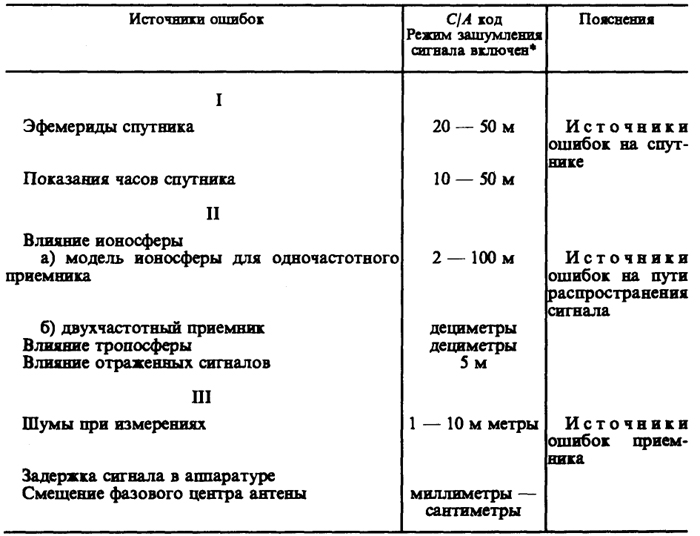
В табл. 14.1 приведены источники ошибок, свойственные GPS при включенном режиме зашумления сигнала (SA), так как этот режим является стандартным с ноября 1991 г.; ошибки измерения с использованием Р-кода не приводятся, так как он недоступен геодезистам.
При кодовых измерениях приемник принимает специальный сигнал, называемый кодом, который состоит из некоторого количества единичных сигналов, чередование которых для непосвященного человека воспринимается как случайный процесс. Такие сигналы называют псевдослучайными кодами. Каждый спутник NAVSTAR GPS излучает свой код, спутники ГЛОНАСС используют единый код на все спутники. В памяти приемника хранятся все коды, по которым производится распознавание номера спутника (для NAVSTAR GPS), российские спутники распознаются по частоте излучения. В приемнике также формируются точно такие же коды,
180
что и на спутниках и, сравнивая кодовые сигналы, принятые со спутников, с аналогичными сигналами, созданными в приемнике, решают две задачи:
- 1) псевдослучайная последовательность позволяет принимать сигналы малой мощности с помощью компактных антенн;
- 2) надежно регистрировать время приема кодового сигнала по часам приемника.
В связи с тем, что часы приемника не столь стабильны как часы на спутниках (часы приемника примерно в миллион раз менее стабильны, чем часы на спутнике), одновременно с координатами приемника (Хп, Yп, Zп) определяется и поправка в часы приемника δt, всего четыре неизвестных.
Интервал времени между излучением сигнала на спутнике Тс и приемом его в приемнике Тп, умноженному на скорость распространения электромагнитных волн υ, называют псевдодальностью, так как она содержит значительную ошибку часов приемника:
D’ = (Tп - Tс)υ.
Расстояние между спутником и приемником на момент измерения связано с результатами измерений следующим соотношением:
D + δtυ = (Tп - Tс)υ
или
√(Xc - Xп)2 + (Yc - Yп)2 + (Zc - Zп)2 + δtυ = (Tп - Tс)υ.
Таких измерений должно быть минимум 4, которые решаются как пространственная линейная при дальномерных измерениях.
При фазовых измерениях псевдослучайные коды не используются, а измерения выполняют на несущей частоте, которую освобождают от модуляции. В связи с тем, что длина волны несущей частоты величина небольшая - 19 см, а точность измерения разности фаз составляет ≈ 1%, то потенциальная точность фазовых измерений составляет 2 мм, а при длительных измерениях за счет осреднения эта точность в некоторых случаях может быть еще увеличена.
В связи с тем, что частота на спутнике не совпадает с частотой приемника, начальные фазы этих частот также не совпадают, то техническая реализация таких измерений довольно сложная, но суть ее сводится к тому, что с нескольких спутников (обычно не менее 4) принимают сигналы и подсчитывают количество фазовых циклов принятых сигналов за единый интервал времени.
Составление результатов измерений фазовых циклов является основой для вычисления приращений координат пунктов, на которых были выполнены синхронные измерения.
181
